Robots are more and more part of our life: they can be met in a hospital, in a supermarket, or even when you are walking along the street. More generally they are called service robots to specify the diversity from the industrial ones. This trend is confirmed by the annual International Federation of Robotics (IFR) press release: “Robots are clearly on the rise, in manufacturing and increasingly in everyday environments […] Future product visions point to domestic robots of higher sophistication, capability and value, such as assistive robots for supporting the elderly, for helping with household chores and for entertainment” [1].
Not only robots are becoming a constant presence in people’s day, moreover they are starting to act as a human being. To better understand the future capabilities of robots, it can be taken into account the video published by Boston Dynamics, spin-off from Massachusetts Institute of technology. It shows one of their robots: Atlas, performing acrobatics exercise. Below you can find the clip whether you have lost it.
The first impressive thing is the difficulty of the actions Atlas performs, in particular the astonishing somersault. Furthermore, it is to be taken into account that the robot is autonomous. But the most thrilling aspect is the naturalness and human-likeness of the action.
In order to tackle new challenges thrown by robots such as Atlas, people must have the correct attitude toward them and furthermore robots have to be designed effectively. This is one of the Human-Robot Interaction’s (HRI) aims according to Goodrich and Schultz. In fact, they say: “[HRI is] a field of study dedicated to understanding, designing, and evaluating robotic systems for use by or with humans”. Its goal, they continue, is “to understand and shape the interactions between one or more humans and one or more robots” [2]. Another very interesting definition of HRI is stated by Kerstin Dautenhahn. She says: “HRI is the science of studying people’s behaviour and attitudes towards robots in relationship to the physical, technological and interactive features of the robots, with the goal to develop robots that facilitate the emergence of human-robot interactions that are at the same time efficient (according to the original requirements of their envisaged area of use), but are also acceptable to people, and meet the social and emotional needs of their individual users as well as respecting human values” [3].
Ab.Acus, thanks to the experience gained coordinating RETRAINER, is directly involved in this process being part of REELER. REELER is an EU funded project in the H2020 program with the aim of enabling ethical and responsible robot design. REELER introduces new tools for its goal: Robot Expert Panel (REP) and socio drama to offer invited roboticists a chance to gain new perspectives on their own R&D on robot technology with colleagues, meanwhile mini-publics will involve citizens and policy makers to discuss specific cases to unveil doubts and concerns.
Furthermore, the novel concepts of human proximity spectrum is presented to characterize the possible ethical and social issues interwoven in robot’s design.
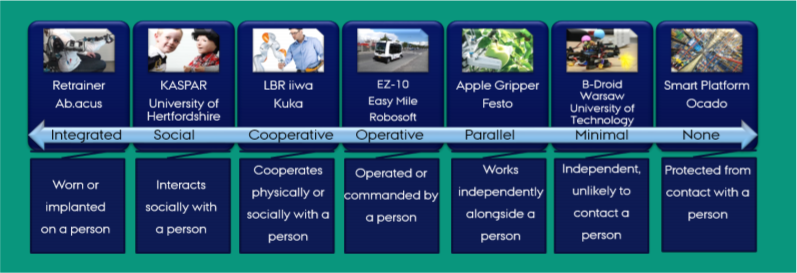
Human proximity spectrum [4]
Stay tuned!
Alex Gimondi
Researcher at Ab.Acus
[1] IFR Press release, “Why service robots are booming worldwide – IFR forecasts sales up 12%”. 2017. https://ifr.org/ifr-press-releases/news/why-service-robots-are-booming-worldwide (19/12/2017)
[2] Michael A. Goodrich and Alan C. Shultz. Human-Robot Interaction: A Survey. Foundations and Trends in Human-Computer Interaction Vol 1, No 3 (2007) 203-275
[3] Kerstin Dautenhahn. The Encyclopedia of Human-Computer Interaction, 2nd Ed. Chapter 38 Human-Robot Interaction. https://www.interaction-design.org/literature/book/the-encyclopedia-of-human-computer-interaction-2nd-ed/human-robot-interaction. (28/03/2017)
[4] http://reeler.eu/fileadmin/user_upload/REELER/REELER_Poster_ERF_2017.pdf. 19/12/17